
Un glossaire facile à comprendre des termes courants de la robotique
Publié: 2021-09-14Les gens ont tendance à avoir une définition très étroite de ce qui constitue un robot.
Les bras métalliques, les servomoteurs et les capteurs visuels ne font pas un robot. Si vous faites un examen même sommaire de l'histoire de la robotique, vous trouverez de nombreux exemples de robots inventés avant l'électricité qui sont tout autant des machines autonomes que les innovations high-tech d'aujourd'hui.
Termes robotisés de A à Z :
- Termes de robot A à E
- Termes de robot F à K
- Termes de robot L à Z
Terminologie robotique pertinente
En poursuivant sur Internet, vous avez peut-être rencontré plusieurs termes utilisés de toutes sortes de manières incorrectes. Ce guide vous donnera tout ce dont vous avez besoin pour comprendre le jargon utilisé par les universitaires et les leaders d'opinion autoproclamés.
Qui a inventé le terme « robot » ?
Le mot «Robot» a été utilisé pour la première fois pour décrire les automates artificiels par l'écrivain Karel Capek dans sa pièce de 1920 Rossum's Universal Robots.
Termes de robot A à E
UN
Actionneur : un moteur qui lit les signaux de programmation et les traduit en mouvement mécanique.
Aérobot : type de robot aérien qui se distingue par sa capacité de vol autonome.
Android : un robot humanoïde conçu pour ressembler à un homme humain adulte. Le préfixe « andro » fait référence au genre masculin attribué à la machine.
Manipulateur articulé : bras de robot divisé en segments indépendants contrôlés par une ou plusieurs articulations.
Automate : processus par lequel le travail humain est remplacé par des machines autonomes.
Véhicule autonome : tout véhicule qui peut fonctionner sans contrôle humain direct, généralement grâce à un système de pilote automatique intégré.
Axe/degré de liberté : ce terme fait référence à la façon dont un bras ou un corps de robot peut manœuvrer. Cela correspond au nombre de joints dans une machine particulière. Bien que les articulations aux degrés de liberté ne soient pas un rapport de 1:1, plus d'articulations est le moyen le plus simple d'obtenir un plus grand degré de liberté pour un robot.
B
Bionique : action d'utiliser des systèmes biologiques ou des processus organiques pour le développement et la conception de nouveaux robots.
C
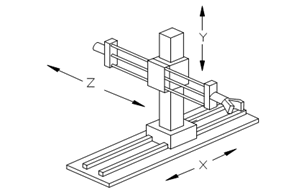 fonction d'un art robotique cartésien, avec l'aimable autorisation de toshiba.com
fonction d'un art robotique cartésien, avec l'aimable autorisation de toshiba.com
Manipulateur cartésien : un bras robotique avec des articulations prismatiques pour le mouvement le long du système de coordonnées X, Y, Z.
Unité centrale de traitement : fonctionnellement, le « cerveau » du robot. Il s'agit de la carte de circuit imprimé principale et traite les entrées préprogrammées et de commande.
Robotique cloud : tout robot qui tire une capacité fonctionnelle du cloud.
Cobots : robots qui s'interfacent directement avec les humains.
Système de contrôleur : un ordinateur d'un certain type qui stocke des données, exécute des programmes et dirige les opérations du robot.
Cyborg : raccourci pour « organisme cybernétique », c'est tout être qui possède à la fois des parties biologiques et artificielles.
Vous vous intéressez à l'origine de ces termes ? Découvrez notre aperçu de l'histoire des robots! |

ré
Temps d'arrêt : toute période de temps pendant laquelle un robot ne fonctionne pas. Ceci est généralement utilisé pour désigner un dysfonctionnement ou une erreur de fonctionnement.
E
Effecteur terminal : terme général désignant l'outil spécialement conçu pour permettre à un robot d'exécuter une tâche spécifique, telle qu'une pince ou un pistolet de soudage.
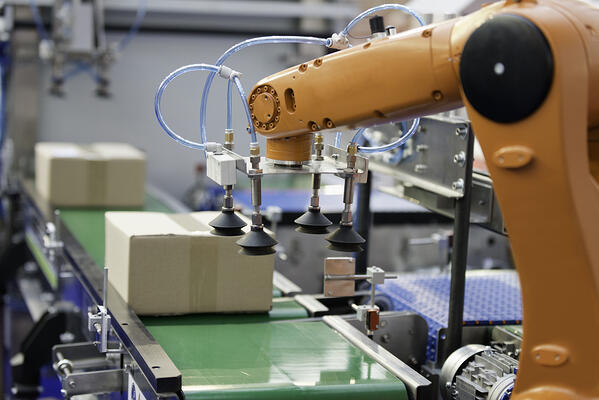 Un exemple d'effecteur terminal sur un robot industriel (source : robotics.org)
Un exemple d'effecteur terminal sur un robot industriel (source : robotics.org)
Termes de robotique F à K
F
Capteur de rétroaction : mécanisme par lequel les données environnementales sont renvoyées à l'unité centrale de traitement, qui les utilise pour ajuster les mouvements du robot.
 Différentes variantes de capteurs de robot (source : http://iggyclass.blogspot.com)
Différentes variantes de capteurs de robot (source : http://iggyclass.blogspot.com)

Limitation de force : une fonction de sécurité qui programme un robot pour qu'il se déplace à une vitesse lente et sûre pour permettre aux humains de travailler autour de lui sans barrières ni boucliers.
Capteur de force : un appareil qui surveille la force exercée par le manipulateur principal d'un robot, généralement comme mesure de sécurité pour les humains et pour surveiller la tension sur l'appareil.
g
Portique : mécanisme de levage d'un robot fixé à une plate-forme ou à un rail.
Gynoïde : semblable à un androïde, un gynoïde est destiné à invoquer le corps féminin.
 Exemple de robot féminisé du jeu vidéo Starcraft II
Exemple de robot féminisé du jeu vidéo Starcraft II
H
Haptique : technologie qui utilise le sens du toucher dans un robot manipulateur pour ajuster les mouvements de la machine.
Faisceau : fils regroupés qui fournissent de l'énergie et des données à une partie du robot.
Hexapode : un robot à six pattes qui s'inspire des insectes organiques.

Humanoïde : tout robot censé ressembler à un humain et exécuter des activités traditionnellement réservées aux humains.
Hydraulique : une méthode pour générer de la force à travers un liquide sous pression.
je
Robot industriel : manipulateur conçu pour exécuter des commandes spécialisées afin de remplir un segment de la chaîne industrielle de fabrication. Par exemple, un robot industriel peut être programmé pour souder des châssis de voiture ensemble.
Périphérique d'entrée : tout périphérique permettant aux humains d'interagir avec un robot. Habituellement, c'est dans le but de programmer des actions futures ou de contrôler directement la locomotion immédiate.
Robot intelligent : un robot qui peut adapter sa fonction en fonction de données sensorielles sans intervention humaine directe. Signifie généralement la fusion de la robotique et d'une certaine forme d'intelligence artificielle.
J
Matrice jacobienne : ensemble d'algorithmes utilisés pour aider à positionner un robot.
Termes de robot L à Z
L
Laser : un faisceau de lumière étroit et focalisé qui est souvent utilisé comme capteur sans contact pour les robots et peut être utilisé pour tout, de la télémétrie au soudage.
N
Nanobot : tout dispositif autonome constitué de composants moléculaires et fonctionnant à l'échelle nanométrique (un milliardième de mètre)
P
Charge utile : la charge utile fait référence au poids qu'un robot particulier peut porter ou soulever. Cela affectera la taille et la complexité du déploiement pour une machine donnée.
Points de pincement : toutes les articulations exposées qui pourraient attraper des appendices humains ou des vêtements.
Pneumatique : méthode de génération de force à l'aide de gaz ou d'air comprimé.
Exosquelette motorisé : une machine portable qui augmente la force et l'endurance du corps humain.
Le mech est un incontournable de la science-fiction et un exemple dramatique de ce que les exosquelettes pourraient un jour être
Prothétique : robots programmables destinés à remplacer les parties organiques manquantes du corps. Le plus couramment utilisé en médecine pour les amputés des jambes et des bras.
R
Robot : appareil capable d'exécuter une tâche indépendamment du contrôle ou de l'activité humaine directe.
RPA : logiciel qui utilise des robots métaphoriques pour exécuter des tâches complexes.
S
Capteur : divers instruments que les robots peuvent utiliser pour collecter des formes de données environnementales qui permettent à la machine d'ajuster sa propre position et ses tâches en fonction de ces stimuli.
Singularité : une configuration d'un bras de robot où deux articulations s'alignent le long d'un axe commun.
tu
Disponibilité : la période de temps pendant laquelle un robot fonctionne comme prévu.
Le chemin de la connaissance
Maintenant que vous comprenez ces termes de robotique couramment recherchés, vous devriez savoir tout ce dont vous avez besoin pour explorer les derniers développements en robotique et en IA ! Pendant que vous y êtes, jetez un coup d'œil à certains des types de robots pour avoir une bonne idée de ce dont les gens parlent sur le terrain aujourd'hui.
Vous souhaitez en savoir plus sur la robotique ? Découvrez comment les trois lois de la robotique d'Isaac Asimov sont utilisées depuis des décennies pour programmer la moralité.