
Un glosar ușor de înțeles al termenilor uzuali de robotică
Publicat: 2021-09-14Oamenii tind să aibă o definiție foarte restrânsă a ceea ce constituie un robot.
Brațele metalice, servomotoarele și senzorii vizuali nu fac un robot. Dacă luați chiar și o examinare superficială a istoriei roboticii, veți găsi o mulțime de exemple de roboți inventați înainte de a exista electricitate, care sunt la fel de mult mașini autonome ca și inovațiile high-tech de astăzi.
Termeni robot de la A la Z:
- Termenii robot de la A la E
- Termenii de robot de la F la K
- Termenii robot de la L la Z
Terminologia robotică relevantă
În timp ce urmăriți internetul, este posibil să fi întâlnit mai mulți termeni folosiți în tot felul de moduri incorecte. Acest ghid vă va oferi tot ceea ce aveți nevoie pentru a înțelege jargonul aruncat în jur de academicieni și de lideri de gândire.
Cine a inventat termenul „robot”?
Cuvântul „Robot” a fost folosit pentru prima dată pentru a descrie automatele artificiale de scriitorul Karel Capek în piesa sa din 1920 „Roboții universali ai lui Rossum”.
Termenii robot de la A la E
A
Actuator: un motor care citește semnalele de programare și le transpune în mișcare mecanică.
Aerobot : un tip de robot aerian care se distinge prin capacitatea sa de zbor independent.
Android: un robot umanoid conceput să semene cu un bărbat adult. Prefixul „andro” se referă la genul masculin atribuit mașinii.
Manipulator articulat: un braț robot care este împărțit în segmente independente care sunt controlate de una sau mai multe articulații.
Automat: procesul prin care munca umană este înlocuită cu mașini autonome.
Vehicul autonom: orice vehicul care poate funcționa fără control uman direct, de obicei printr-un sistem de pilot automat încorporat.
Axa/gradul de libertate: acest termen se referă la modul în care un braț sau un corp robot poate manevra. Aceasta corespunde numărului de îmbinări dintr-o anumită mașină. În timp ce articulațiile în grade de libertate nu este un raport de 1:1, mai multe articulații este cea mai simplă modalitate de a obține un grad mai mare de libertate pentru un robot.
B
Bionica: actul de a utiliza sisteme biologice sau procese organice pentru dezvoltarea și proiectarea de noi roboți.
C
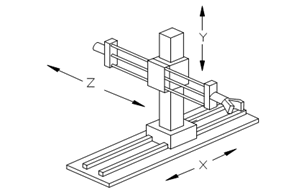 funcția unei arte robotice carteziene, prin amabilitatea toshiba.com
funcția unei arte robotice carteziene, prin amabilitatea toshiba.com
Manipulator cartezian: un braț robot cu articulații prismatice pentru mișcare de-a lungul sistemului de coordonate X, Y, Z.
Unitate centrală de procesare: funcțional, „creierul” robotului. Este placa principală de circuit și procesează intrările preprogramate și de comandă.
Robotică în cloud: orice robot care obține o capacitate funcțională din cloud.
Coboți: roboți care interacționează direct cu oamenii.
Sistem de control: un computer de un anumit tip care stochează date, execută programe și dirijează operațiunile robotului.
Cyborg: prescurtare pentru „organism cibernetic”, este orice ființă care posedă atât părți biologice, cât și artificiale.
Te interesează cum au apărut acești termeni? Consultați prezentarea noastră de ansamblu asupra istoriei roboților! |

D
Timp de nefuncționare: orice perioadă de timp în care un robot nu funcționează. Acesta este de obicei folosit pentru a se referi la defecțiuni sau erori de funcționare.
E
Efector final: un termen general pentru unealta special concepută pentru a permite unui robot să execute o anumită sarcină, cum ar fi o pistă sau un pistol de sudură.
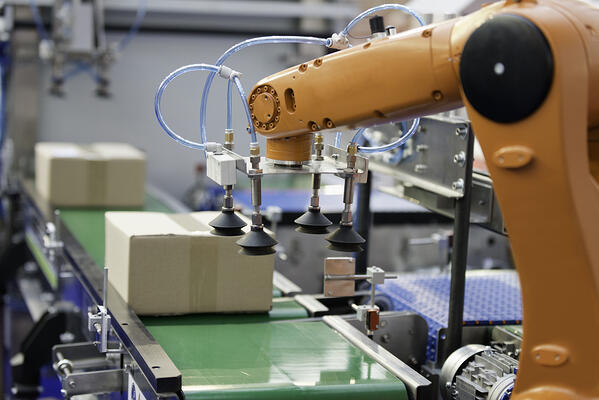 Un exemplu de efect final pe un robot industrial (sursa: robotics.org)
Un exemplu de efect final pe un robot industrial (sursa: robotics.org)
Termenii robotici de la F la K
F
Senzor de feedback: mecanismul prin care datele de mediu sunt transmise înapoi la unitatea centrală de procesare, care le folosește pentru a regla mișcările robotului.
 Diferite variante de senzori robot (sursa: http://iggyclass.blogspot.com)
Diferite variante de senzori robot (sursa: http://iggyclass.blogspot.com)

Limitarea forței: o funcție de siguranță care programează un robot să se miște cu o viteză lentă și sigură pentru a permite oamenilor să lucreze în jurul lui fără bariere sau scuturi.
Senzor de forță: un dispozitiv care monitorizează forța exercitată de manipulatorul principal al unui robot, de obicei ca măsură de siguranță pentru oameni și pentru a monitoriza tensiunea asupra dispozitivului.
G
Gantry: un mecanism de ridicare pentru un robot care este fixat pe o platformă sau pe șină.
Gynoid: similar cu un android, un gynoid este menit să invoce corpul feminin.
 Exemplu de robot feminizat din jocul video Starcraft II
Exemplu de robot feminizat din jocul video Starcraft II
H
Haptic: tehnologie care folosește simțul tactil într-un robot manipulator pentru a regla mișcările mașinii.
Cablaj: fire incluse care furnizează energie și date unei părți a robotului.
Hexapod: un robot cu șase picioare care se inspiră din insectele organice.

Umanoid: orice robot menit să semene cu un om și să execute activități tradiționale exclusiv umane.
Hidraulica: o metodă de generare a forței prin lichid sub presiune.
eu
Robot industrial: un manipulator conceput pentru a executa comenzi specializate pentru a umple un segment al lanțului industrial de fabricație. De exemplu, un robot industrial ar putea fi programat pentru a suda cadrele mașinilor împreună.
Dispozitiv de intrare: orice dispozitiv care permite oamenilor să interfațeze cu un robot. De obicei, aceasta este în scopul programării acțiunilor viitoare sau al controlului direct asupra locomoției imediate.
Robot inteligent: un robot care își poate adapta funcția pe baza datelor senzoriale fără intervenția umană directă. De obicei, menit să se refere la fuziunea dintre robotică și o formă de inteligență artificială.
J
Matrice jacobiană: un set de algoritmi care sunt utilizați pentru a ajuta la poziționarea unui robot.
Termenii robot de la L la Z
L
Laser: un fascicul de lumină îngust și focalizat care este adesea folosit ca senzori fără contact pentru roboți și poate fi folosit pentru orice, de la găsirea distanței până la sudare.
N
Nanobot: orice dispozitiv autonom care este construit din componente moleculare și funcționează la scară nanometrică (o miliardime dintr-un metru)
P
Sarcina utilă: sarcina utilă se referă la greutatea pe care o poate transporta sau ridica un anumit robot. Acest lucru va afecta dimensiunea și complexitatea implementării pentru o anumită mașină.
Puncte de prindere: orice articulații expuse care ar putea prinde anexele sau îmbrăcămintea umană.
Pneumatică: o metodă de generare a forței utilizând gaz sau aer comprimat.
Powered Exoscheleton: o mașină purtabilă care crește rezistența și rezistența cadrului uman.
Mech-ul este o bază SF și un exemplu dramatic a ceea ce ar putea fi exoscheletele într-o zi
Proteză: roboți programabili meniți să înlocuiască părțile organice lipsă ale corpului. Cel mai frecvent utilizat în medicină pentru ampuții de picioare și brațe.
R
Robot: un dispozitiv care poate executa o sarcină independent de controlul sau activitatea umană directă.
RPA: software care utilizează lucrători roboti metaforici pentru a executa sarcini complexe.
S
Senzor: diverse instrumente pe care roboții le pot folosi pentru a culege forme de date de mediu care permit mașinii să-și ajusteze propria poziție și sarcini pe baza acestor stimuli.
Singularitate: o configurație a unui braț robot în care două articulații devin aliniate de-a lungul unei axe comune.
U
Uptime: perioada de timp în care un robot funcționează conform intenției.
Calea către cunoaștere
Acum că înțelegeți acești termeni de robotică căutați în mod obișnuit, ar trebui să știți tot ce aveți nevoie pentru a explora cele mai recente evoluții în robotică și AI! În timp ce sunteți la asta, aruncați o privire la unele dintre tipurile de roboți pentru a obține o idee bună despre ceea ce vorbesc oamenii în domeniu astăzi.
Vrei să afli mai multe despre robotică? Descoperiți cum cele trei legi ale roboticii ale lui Isaac Asimov au fost folosite timp de decenii pentru a programa moralitatea.