
Un glosario fácil de entender de términos comunes de robótica
Publicado: 2021-09-14La gente tiende a tener una definición muy limitada de lo que constituye un robot.
Los brazos de metal, los servomotores y los sensores visuales no hacen un robot. Si realiza un examen superficial de la historia de la robótica, encontrará muchos ejemplos de robots inventados antes de que existiera la electricidad que son máquinas tan autónomas como las innovaciones de alta tecnología de la actualidad.
Términos de robot de la A a la Z:
- Términos de robot A a E
- Términos de robot F a K
- Términos de robot L a Z
Terminología relevante de robótica
Mientras buscaba en Internet, es posible que se haya encontrado con varios términos que se utilizan en todo tipo de formas incorrectas. Esta guía le brindará todo lo que necesita para comprender la jerga que utilizan los académicos y los autodenominados líderes de opinión.
¿Quién acuñó el término 'robot'?
La palabra 'Robot' fue utilizada por primera vez para describir autómatas artificiales por el escritor Karel Capek en su obra de 1920 Rossum's Universal Robots.
Términos de robot A a E
A
Actuador: un motor que lee señales de programación y las traduce en movimiento mecánico.
Aerobot : un tipo de robot aéreo que se distingue por su capacidad de vuelo independiente.
Android: un robot humanoide diseñado para parecerse a un hombre humano adulto. El prefijo 'andro' se refiere al género masculino asignado a la máquina.
Manipulador articulado: un brazo robótico que se divide en segmentos independientes que son controlados por una o más articulaciones.
Autómata: el proceso por el cual el trabajo humano es reemplazado por máquinas autónomas.
Vehículo autónomo: cualquier vehículo que pueda operar sin control humano directo, generalmente a través de un sistema de piloto automático incorporado.
Eje/grado de libertad: este término se refiere a cómo puede maniobrar un brazo o cuerpo robótico. Esto corresponde al número de juntas en una máquina en particular. Si bien las articulaciones a los grados de libertad no son una proporción de 1:1, más articulaciones es la forma más directa de lograr un mayor grado de libertad para un robot.
B
Biónica: el acto de usar sistemas biológicos o procesos que ocurren orgánicamente para el desarrollo y diseño de nuevos robots.
C
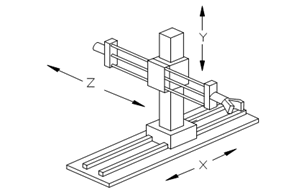 función de un arte robótico cartesiano, cortesía de toshiba.com
función de un arte robótico cartesiano, cortesía de toshiba.com
Manipulador cartesiano: un brazo robótico con articulaciones prismáticas para el movimiento a lo largo del sistema de coordenadas X, Y, Z.
Unidad central de procesamiento: funcionalmente, el 'cerebro' del robot. Es la placa de circuito principal y procesa las entradas preprogramadas y de comando.
Robótica en la nube: cualquier robot que obtenga una capacidad funcional de la nube.
Cobots: robots que interactúan directamente con los humanos.
Sistema controlador: una computadora de algún tipo que almacena datos, ejecuta programas y dirige las operaciones del robot.
Cyborg: abreviatura de 'organismo cibernético', es cualquier ser que posee partes tanto biológicas como artificiales.
¿Le interesa saber cómo surgieron estos términos? ¡Vea nuestra descripción general de la historia de los robots! |

D
Tiempo de inactividad: cualquier período de tiempo en el que un robot no está funcionando. Esto generalmente se usa para referirse a un mal funcionamiento o error operativo.
mi
Efector final: un término general para la herramienta diseñada específicamente para permitir que un robot ejecute una tarea específica, como una pinza o una pistola de soldar.
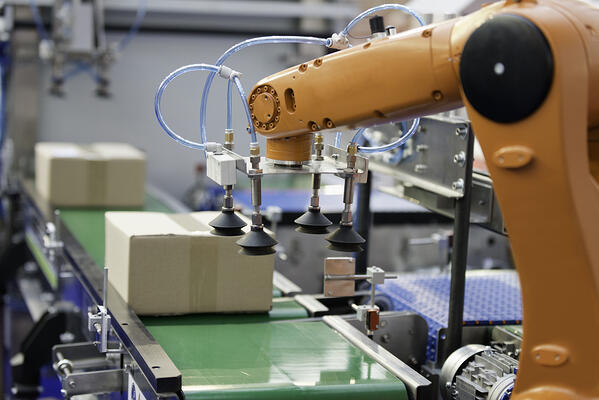 Un ejemplo de un efector final en un robot industrial (fuente: robotics.org)
Un ejemplo de un efector final en un robot industrial (fuente: robotics.org)
Términos de robótica F a K
F
Sensor de retroalimentación: el mecanismo a través del cual los datos ambientales se retroalimentan a la unidad central de procesamiento, que los utiliza para ajustar los movimientos del robot.
 Diferentes variantes de sensores de robot (fuente: http://iggyclass.blogspot.com)
Diferentes variantes de sensores de robot (fuente: http://iggyclass.blogspot.com)

Limitación de fuerza: una función de seguridad que programa un robot para que se mueva a una velocidad lenta y segura para permitir que los humanos trabajen a su alrededor sin barreras ni escudos.
Sensor de fuerza: un dispositivo que monitorea la fuerza ejercida por el manipulador principal de un robot, generalmente como medida de seguridad para los humanos y para monitorear la tensión en el dispositivo.
GRAMO
Pórtico: un mecanismo de elevación para un robot que se fija a una plataforma o vía.
Ginoide: similar a un androide, un ginoide está destinado a invocar el cuerpo femenino.
 Ejemplo de un robot feminizado del videojuego Starcraft II
Ejemplo de un robot feminizado del videojuego Starcraft II
H
Háptico: tecnología que utiliza el sentido del tacto en un robot manipulador para ajustar los movimientos de la máquina.
Arnés: cables agrupados que entregan energía y datos a una parte del robot.
Hexapod: un robot de seis patas que se inspira en los insectos orgánicos.

Humanoide: cualquier robot destinado a parecerse a un humano y ejecutar actividades tradicionalmente exclusivas para humanos.
Hidráulica: un método para generar fuerza a través de líquido bajo presión.
yo
Robot industrial: un manipulador diseñado para ejecutar comandos especializados con el fin de llenar un segmento de la cadena industrial de fabricación. Por ejemplo, un robot industrial podría programarse para soldar armazones de automóviles.
Dispositivo de entrada: cualquier dispositivo que permita a los humanos interactuar con un robot. Por lo general, esto es para programar acciones futuras o controlar directamente la locomoción inmediata.
Robot inteligente: un robot que puede adaptar su función basándose en datos sensoriales sin intervención humana directa. Por lo general, significa referirse a la fusión de la robótica y alguna forma de inteligencia artificial.
j
Matriz jacobiana: un conjunto de algoritmos que se utilizan para ayudar a posicionar un robot.
Términos de robot L a Z
L
Láser: un haz de luz estrecho y enfocado que a menudo se usa como sensores sin contacto para robots y se puede usar para cualquier cosa, desde encontrar distancias hasta soldar.
norte
Nanobot: cualquier dispositivo autónomo construido con componentes moleculares y que funcione a nanoescala (una milmillonésima parte de un metro)
PAGS
Carga útil: la carga útil se refiere al peso que un robot en particular puede transportar o levantar. Esto afectará el tamaño y la complejidad de la implementación de una máquina determinada.
Puntos de pellizco: cualquier articulación expuesta que pueda atrapar apéndices humanos o ropa.
Neumática: un método para generar fuerza usando gas comprimido o aire.
Exoesqueleto motorizado: una máquina portátil que aumenta la fuerza y la resistencia del cuerpo humano.
El robot es un ejemplo dramático y básico de ciencia ficción de lo que algún día podrían ser los exoesqueletos.
Prótesis: robots programables destinados a reemplazar partes orgánicas faltantes del cuerpo. Más comúnmente utilizado en medicina para amputados de piernas y brazos.
R
Robot: un dispositivo que puede ejecutar una tarea independientemente del control o actividad humana directa.
RPA: software que utiliza trabajadores robot metafóricos para ejecutar tareas complejas.
S
Sensor: varios instrumentos que los robots pueden usar para recopilar formas de datos ambientales que le permiten a la máquina ajustar su propia posición y tareas en función de estos estímulos.
Singularidad: una configuración de un brazo robótico donde dos articulaciones se alinean a lo largo de un eje común.
tu
Tiempo de actividad: el período de tiempo en el que un robot funciona según lo previsto.
El camino al conocimiento
Ahora que comprende estos términos de robótica comúnmente buscados, ¡debe saber todo lo que necesita para explorar los últimos desarrollos en robótica e IA! Mientras lo hace, eche un vistazo a algunos de los tipos de robots para tener una buena idea de lo que la gente está hablando en el campo hoy.
¿Interesado en aprender más sobre robótica? Descubra cómo las tres leyes de la robótica de Isaac Asimov se han utilizado durante décadas para programar la moralidad.