
Łatwy do zrozumienia słowniczek popularnych terminów dotyczących robotyki
Opublikowany: 2021-09-14Ludzie mają bardzo wąską definicję robota.
Metalowe ramiona, serwomotory i czujniki wizualne nie są dziełem robota. Jeśli przyjrzysz się choćby pobieżnej historii robotyki, znajdziesz mnóstwo przykładów robotów wynalezionych przed pojawieniem się elektryczności, które są tak samo autonomicznymi maszynami, jak dzisiejsze innowacje high-tech.
Terminy dotyczące robotów od A do Z:
- Terminy dotyczące robotów od A do E
- Terminy dotyczące robotów od F do K
- Terminy dotyczące robotów od L do Z
Odpowiednia terminologia robotyki
Śledząc Internet, możesz natknąć się na kilka terminów, które są używane w niepoprawny sposób. Ten przewodnik da ci wszystko, czego potrzebujesz, aby zrozumieć żargon rzucany przez naukowców i samozwańczych liderów myśli.
Kto ukuł termin „robot”?
Słowo „Robot” zostało po raz pierwszy użyte do opisania sztucznych automatów przez pisarza Karela Capka w jego sztuce Rossum Universal Robots z 1920 roku.
Terminy dotyczące robotów od A do E
A
Aktuator: silnik, który odczytuje sygnały programowe i przekłada je na ruch mechaniczny.
Aerobot : rodzaj robota powietrznego, który wyróżnia się zdolnością do samodzielnego lotu.
Android: humanoidalny robot zaprojektowany tak, aby przypominał dorosłego człowieka. Przedrostek „andro” odnosi się do przypisanej męskiej płci maszyny.
Manipulator przegubowy: ramię robota podzielone na niezależne segmenty kontrolowane przez jedno lub więcej przegubów.
Automat: proces, w którym praca ludzka jest zastępowana przez autonomiczne maszyny.
Pojazd autonomiczny: każdy pojazd, który może działać bez bezpośredniej kontroli człowieka, zwykle za pośrednictwem wbudowanego systemu autopilota.
Oś/stopień swobody: termin ten odnosi się do sposobu manewrowania ramieniem lub ciałem robota. Odpowiada to liczbie połączeń w danej maszynie. Chociaż stosunek połączeń do stopni swobody nie jest stosunkiem 1:1, większa liczba połączeń to najprostszy sposób na osiągnięcie większego stopnia swobody robota.
B
Bionika: akt wykorzystywania systemów biologicznych lub procesów zachodzących organicznie do opracowywania i projektowania nowych robotów.
C
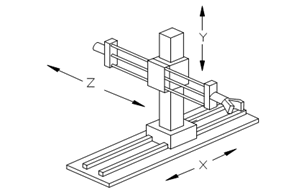 funkcja kartezjańskiej sztuki robotycznej, dzięki uprzejmości toshiba.com
funkcja kartezjańskiej sztuki robotycznej, dzięki uprzejmości toshiba.com
Manipulator kartezjański: ramię robota z pryzmatycznymi przegubami do ruchu wzdłuż układu współrzędnych X, Y, Z.
Jednostka centralna: funkcjonalnie „mózg” robota. Jest to główna płytka drukowana i wstępnie zaprogramowane wejścia procesowe i komendy.
Robotyka w chmurze: każdy robot, który czerpie funkcjonalność z chmury.
Coboty: roboty, które łączą się bezpośrednio z ludźmi.
System kontrolera: komputer pewnego typu, który przechowuje dane, wykonuje programy i kieruje operacjami robota.
Cyborg: skrót oznaczający „organizm cybernetyczny”, to każda istota, która posiada zarówno części biologiczne, jak i sztuczne.
Chcesz wiedzieć, jak powstały te warunki? Sprawdź nasz przegląd historii robotów! |

D
Przestój: dowolny okres, w którym robot nie działa. Jest to zwykle używane w odniesieniu do nieprawidłowego działania lub błędu operacyjnego.
mi
Efektor końcowy: ogólne określenie narzędzia zaprojektowanego specjalnie w celu umożliwienia robotowi wykonania określonego zadania, takiego jak chwytak lub uchwyt spawalniczy.
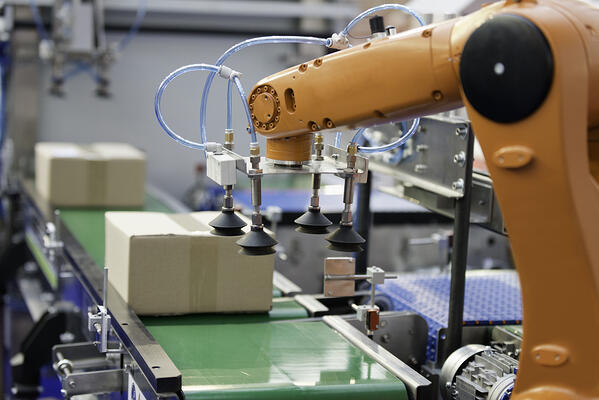 Przykład efektora końcowego na robocie przemysłowym (źródło: robotics.org)
Przykład efektora końcowego na robocie przemysłowym (źródło: robotics.org)
Terminy robotyki od F do K
F
Czujnik sprzężenia zwrotnego: mechanizm, przez który dane środowiskowe są przesyłane z powrotem do jednostki centralnej, która wykorzystuje je do regulacji ruchów robota.
 Różne warianty czujników robota (źródło: http://iggyclass.blogspot.com)
Różne warianty czujników robota (źródło: http://iggyclass.blogspot.com)

Ograniczenie siły: funkcja bezpieczeństwa, która programuje robota, aby poruszał się z małą, bezpieczną prędkością, aby umożliwić ludziom pracę wokół niego bez barier lub osłon.
Czujnik siły: urządzenie monitorujące siłę wywieraną przez główny manipulator robota, zwykle jako środek bezpieczeństwa dla ludzi i monitorujący obciążenie urządzenia.
G
Gantry: mechanizm podnoszący robota, który jest przymocowany do platformy lub toru.
Gynoid: podobnie jak android, gynoid ma przywoływać kobiece ciało.
 Przykład feminizowanego robota z gry wideo Starcraft II
Przykład feminizowanego robota z gry wideo Starcraft II
H
Haptic: technologia wykorzystująca zmysł dotyku w manipulatorze robota do dostosowywania ruchów maszyny.
Wiązka: wiązki przewodów, które dostarczają zasilanie i dane do części robota.
Hexapod: sześcionogi robot, który czerpie inspirację z organicznych owadów.

Humanoid: każdy robot, który ma przypominać człowieka i wykonywać tradycyjne czynności wyłącznie dla ludzi.
Hydraulika: metoda wytwarzania siły przez ciecz pod ciśnieniem.
I
Robot przemysłowy: manipulator przeznaczony do wykonywania specjalistycznych poleceń w celu wypełnienia segmentu przemysłowego łańcucha wytwarzania. Na przykład robota przemysłowego można zaprogramować do spawania ram samochodów.
Urządzenie wejściowe: dowolne urządzenie, które pozwala ludziom komunikować się z robotem. Zwykle służy to programowaniu przyszłych działań lub bezpośredniej kontroli nad natychmiastową lokomocją.
Inteligentny robot: robot, który może dostosować swoją funkcję w oparciu o dane sensoryczne bez bezpośredniej interwencji człowieka. Zazwyczaj odnosi się do fuzji robotyki i jakiejś formy sztucznej inteligencji.
J
Macierz Jakobian: zestaw algorytmów służących do pozycjonowania robota.
Terminy dotyczące robotów od L do Z
L
Laser: wiązka wąskiego i skupionego światła, która jest często używana jako bezdotykowe czujniki w robotach i może być używana do wszystkiego, od znajdowania odległości po spawanie.
N
Nanobot: dowolne autonomiczne urządzenie zbudowane z komponentów molekularnych i działające w nanoskali (jedna miliardowa metra)
P
Ładunek: ładunek odnosi się do ciężaru, jaki może unieść lub podnieść dany robot. Wpłynie to na rozmiar i złożoność wdrożenia na danej maszynie.
Punkty zaciskania: wszelkie odsłonięte stawy, które mogą zaczepić ludzkie kończyny lub odzież.
Pneumatyka: metoda wytwarzania siły za pomocą sprężonego gazu lub powietrza.
Powered Exoskeleton: maszyna do noszenia, która zwiększa siłę i wytrzymałość ludzkiej sylwetki.
Mech jest podstawowym i dramatycznym przykładem tego, czym mogą być egzoszkielety pewnego dnia
Protetyczne: programowalne roboty przeznaczone do zastępowania brakujących organicznych części ciała. Najczęściej stosowany w medycynie dla osób po amputacji nóg i ramion.
R
Robot: urządzenie, które może wykonać zadanie niezależne od bezpośredniej kontroli lub działania człowieka.
RPA: oprogramowanie, które wykorzystuje metaforycznych robotników do wykonywania złożonych zadań.
S
Czujnik: różne instrumenty, których roboty mogą używać do zbierania danych środowiskowych, które umożliwiają maszynie dostosowanie własnej pozycji i zadań w oparciu o te bodźce.
Osobliwość: konfiguracja ramienia robota, w której dwa złącza są wyrównane wzdłuż wspólnej osi.
U
Czas pracy: okres, w którym robot działa zgodnie z przeznaczeniem.
Droga do wiedzy
Teraz, gdy rozumiesz te powszechnie wyszukiwane terminy związane z robotyką, powinieneś wiedzieć wszystko, czego potrzebujesz, aby poznać najnowsze osiągnięcia w robotyce i sztucznej inteligencji! Kiedy już to robisz, spójrz na niektóre typy robotów, aby dobrze zrozumieć, o czym ludzie mówią dzisiaj w terenie.
Chcesz dowiedzieć się więcej o robotyce? Dowiedz się, jak trzy prawa robotyki Isaaca Asimova były używane od dziesięcioleci do programowania moralności.