
Простой для понимания глоссарий общих терминов робототехники
Опубликовано: 2021-09-14Люди, как правило, имеют очень узкое определение того, что представляет собой робот.
Металлические руки, серводвигатели и визуальные датчики не делают робота. Если вы даже бегло изучите историю робототехники, вы найдете множество примеров роботов, изобретенных до того, как появилось электричество, которые являются такими же автономными машинами, как и современные высокотехнологичные инновации.
Термины робота от А до Я:
- Термины робота от A до E
- Термины робота от F до K
- Термины робота от L до Z
Соответствующая терминология робототехники
Блуждая по Интернету, вы могли столкнуться с несколькими терминами, которые используются самыми разными способами. Это руководство даст вам все необходимое для понимания жаргона, используемого учеными и самозваными лидерами мнений.
Кто придумал термин «робот»?
Слово «робот» впервые было использовано для описания искусственных автоматов писателем Карелом Чапеком в его пьесе 1920 года «Универсальные роботы Россума».
Термины робота от A до E
А
Привод: двигатель, который считывает программные сигналы и преобразует их в механическое движение.
Аэробот : тип воздушного робота, отличающийся способностью к самостоятельному полету.
Android: робот-гуманоид, напоминающий взрослого мужчину. Префикс «андро» относится к присвоенному машине мужского пола.
Шарнирный манипулятор: рука робота, разделенная на независимые сегменты, управляемые одним или несколькими суставами.
Автомат: процесс, при котором человеческий труд заменяется автономными машинами.
Автономное транспортное средство: любое транспортное средство, которое может работать без прямого контроля со стороны человека, обычно с помощью встроенной системы автопилота.
Ось/степень свободы: этот термин относится к тому, как рука или тело робота может маневрировать. Это соответствует количеству соединений в конкретной машине. Хотя соотношение суставов и степеней свободы не равно 1:1, большее количество суставов — это самый простой способ добиться большей степени свободы для робота.
Б
Бионика: акт использования биологических систем или органически происходящих процессов для разработки и проектирования новых роботов.
С
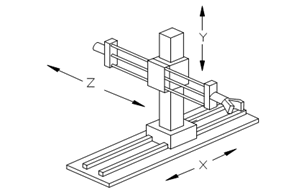 функция декартового роботизированного искусства, любезно предоставлено toshiba.com
функция декартового роботизированного искусства, любезно предоставлено toshiba.com
Декартов манипулятор: роботизированная рука с призматическими шарнирами для перемещения по системе координат X, Y, Z.
Центральный процессор: функционально «мозг» робота. Это основная печатная плата, обрабатывающая предварительно запрограммированные и командные входы.
Облачная робототехника: любой робот, который получает функциональные возможности из облака.
Коботы: роботы, взаимодействующие напрямую с людьми.
Система контроллера: компьютер определенного типа, который хранит данные, выполняет программы и управляет операциями робота.
Киборг: сокращение от «кибернетический организм», это любое существо, обладающее как биологическими, так и искусственными частями.
Интересно, как появились эти термины? Ознакомьтесь с нашим обзором истории роботов! |

Д
Время простоя: любой период времени, когда робот не работает. Обычно это используется для обозначения неисправности или ошибки в работе.
Е
Конечный эффектор: общий термин для инструмента, специально предназначенного для выполнения роботом определенной задачи, например, захват или сварочный пистолет.
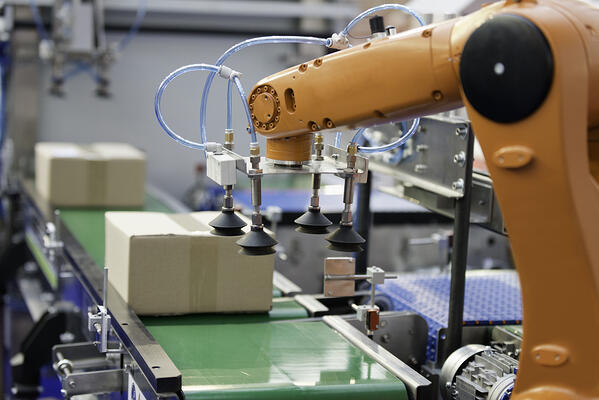 Пример рабочего органа промышленного робота (источник: robotics.org)
Пример рабочего органа промышленного робота (источник: robotics.org)
Термины робототехники от F до K
Ф
Датчик обратной связи: механизм, с помощью которого данные об окружающей среде передаются обратно в центральный процессор, который использует их для корректировки движений робота.
 Различные варианты датчиков роботов (источник: http://iggyclass.blogspot.com)
Различные варианты датчиков роботов (источник: http://iggyclass.blogspot.com)

Ограничение силы: функция безопасности, которая программирует робота двигаться с медленной безопасной скоростью, чтобы люди могли работать вокруг него без барьеров или щитов.
Датчик силы: устройство, которое отслеживает силу, прилагаемую основным манипулятором робота, обычно в качестве меры безопасности для людей и для контроля нагрузки на устройство.
грамм
Gantry: подъемный механизм для робота, прикрепленный к платформе или направляющей.
Гиноид: подобно андроиду, гиноид предназначен для обращения к женскому телу.
 Пример феминизированного робота из видеоигры Starcraft II.
Пример феминизированного робота из видеоигры Starcraft II.
ЧАС
Haptic: технология, использующая осязание робота-манипулятора для регулировки движений машины.
Жгут проводов : пучки проводов, передающие питание и данные на часть робота.
Hexapod: шестиногий робот, вдохновленный органическими насекомыми.

Гуманоид: любой робот, напоминающий человека и выполняющий действия, традиционно предназначенные исключительно для человека.
Гидравлика: метод создания силы с помощью жидкости под давлением.
я
Промышленный робот: манипулятор, предназначенный для выполнения специализированных команд, чтобы заполнить сегмент производственной цепочки производства. Например, промышленный робот может быть запрограммирован на сварку автомобильных рам.
Устройство ввода: любое устройство, позволяющее людям взаимодействовать с роботом. Обычно это делается для программирования будущих действий или прямого контроля над сиюминутной локомоцией.
Интеллектуальный робот: робот, который может адаптировать свою функцию на основе сенсорных данных без прямого вмешательства человека. Обычно подразумевается сочетание робототехники и некоторой формы искусственного интеллекта.
Дж
Матрица Якоби: набор алгоритмов, используемых для позиционирования робота.
Термины робота от L до Z
л
Лазер: луч узкого и сфокусированного света, который часто используется в качестве бесконтактного датчика для роботов и может использоваться для чего угодно, от определения расстояния до сварки.
Н
Нанобот: любое автономное устройство, состоящее из молекулярных компонентов и работающее в наномасштабе (одна миллиардная метра).
п
Полезная нагрузка: полезная нагрузка относится к весу, который конкретный робот может нести или поднимать. Это повлияет на размер и сложность развертывания для данной машины.
Точки защемления: любые открытые суставы, которые могут зацепить человеческие придатки или одежду.
Пневматика: метод создания силы с использованием сжатого газа или воздуха.
Powered Exoskeleton: носимая машина, увеличивающая силу и выносливость человеческого тела.
Мех — это главный научно-фантастический и драматический пример того, чем могут быть экзоскелеты в один прекрасный день.
Протезы: программируемые роботы, предназначенные для замены отсутствующих органических частей тела. Чаще всего используется в медицине для пациентов с ампутированными конечностями и руками.
р
Робот: устройство, которое может выполнять задачу независимо от прямого контроля или деятельности человека.
RPA: программное обеспечение, которое использует метафорических рабочих-роботов для выполнения сложных задач.
С
Датчик: различные инструменты, которые роботы могут использовать для сбора форм данных об окружающей среде, что позволяет машине корректировать свое собственное положение и задачи на основе этих стимулов.
Сингулярность: конфигурация манипулятора робота, в которой два сустава выровнены вдоль общей оси.
U
Время безотказной работы: период времени, в течение которого робот работает по назначению.
Путь к знаниям
Теперь, когда вы понимаете эти часто используемые термины в области робототехники, вы должны знать все, что вам нужно, чтобы изучить последние разработки в области робототехники и искусственного интеллекта! Пока вы этим занимаетесь, взгляните на некоторые типы роботов, чтобы понять, о чем сегодня говорят люди в этой области.
Хотите узнать больше о робототехнике? Узнайте, как три закона робототехники Айзека Азимова десятилетиями использовались для программирования морали.