
一般的なロボティクス用語のわかりやすい用語集
公開: 2021-09-14人々は、ロボットを構成するものについて非常に狭い定義を持つ傾向があります。
金属製のアーム、サーボ モーター、視覚センサーはロボットではありません。 ロボット工学の歴史をざっと見てみると、電気が登場する前に発明されたロボットの例がたくさんありますが、それらは今日のハイテク イノベーションと同じくらい自律的な機械です。
ロボット用語 A ~ Z:
- ロボット用語 A~E
- ロボット用語 F ~ K
- ロボット用語 L ~ Z
関連するロボット用語
インターネットを調べていると、さまざまな用語がさまざまな方法で使用されていることに遭遇したことがあるかもしれません。 このガイドは、学者や自称思想的指導者によって投げかけられている専門用語を理解するために必要なすべてを提供します.
「ロボット」という言葉を作ったのは誰?
「ロボット」という言葉は、作家のカレル・チャペックが 1920 年の戯曲『ロッサムのユニバーサル ロボット』で初めて人工オートマトンを説明するために使用されました。
ロボット用語 A~E
あ
アクチュエーター:プログラミング信号を読み取り、機械的な動きに変換するモーター。
エアロボット : 自立飛行能力が特徴の空中ロボットの一種。
Android:成人男性に似せて設計されたヒューマノイド ロボット。 「アンドロ」という接頭辞は、マシンに割り当てられた男性的な性別を表しています。
多関節マニピュレーター: 1 つ以上のジョイントによって制御される独立したセグメントに分割されたロボット アーム。
オートマトン:人間の労働を自律的な機械に置き換えるプロセス。
自律型車両:通常は組み込みの自動操縦システムを介して、人間が直接制御することなく操作できる車両。
軸/自由度:この用語は、ロボット アームまたはボディの操作方法を指します。 これは、特定のマシンのジョイントの数に対応します。 ジョイントと自由度の比率は 1:1 ではありませんが、ロボットの自由度を高めるには、ジョイントの数を増やすことが最も簡単な方法です。
B
バイオニクス:新しいロボットの開発と設計のために生物学的システムまたは有機的に発生するプロセスを使用する行為。
ハ
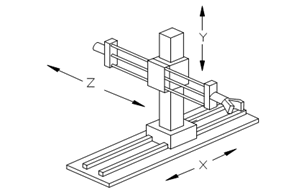 デカルト ロボット アートの機能、toshiba.com 提供
デカルト ロボット アートの機能、toshiba.com 提供
デカルト マニピュレータ: X、Y、Z 座標系に沿って移動するためのプリズム ジョイントを備えたロボット アーム。
中央処理装置:機能的には、ロボットの「頭脳」。 これはメイン回路基板であり、事前にプログラムされたコマンド入力を処理します。
クラウド ロボティクス: クラウドから機能能力を引き出す任意のロボット。
コボット:人間と直接やり取りするロボット。
コントローラー システム:データを保存し、プログラムを実行し、ロボットの操作を指示する、ある種のコンピューター。
サイボーグ: 「サイバネティック生物」の省略形で、生物学的部分と人工部分の両方を備えたあらゆる存在です。
これらの用語がどのように生まれたかに興味がありますか? ロボットの歴史の概要をご覧ください。 |

D
ダウンタイム:ロボットが機能していない時間。 これは通常、操作上の不具合やエラーを指すために使用されます。
え
エンド エフェクタ:グリッパーや溶接ガンなど、ロボットが特定のタスクを実行できるように特別に設計されたツールの総称。
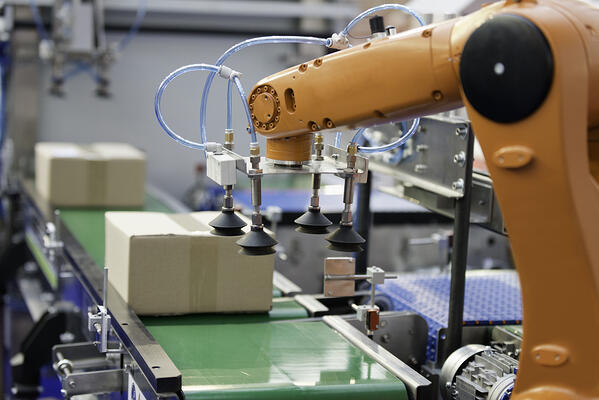 産業用ロボットのエンドエフェクタの例 (出典: robots.org)
産業用ロボットのエンドエフェクタの例 (出典: robots.org)
ロボット用語 F ~ K
ふ
フィードバック センサー:環境データが中央処理装置にフィードバックされ、ロボットの動きを調整するために使用されるメカニズム。
 ロボット センサーのさまざまなバリエーション (出典: http://iggyclass.blogspot.com)
ロボット センサーのさまざまなバリエーション (出典: http://iggyclass.blogspot.com)

力の制限:ロボットがゆっくりと安全な速度で動くようにプログラムする安全機能で、人間がバリアやシールドなしでロボットを回避できるようにします。
力センサー:ロボットの主要なマニピュレータによって加えられる力を監視するデバイスで、通常は人間の安全対策として、およびデバイスのひずみを監視します。
G
ガントリー:プラットフォームまたはトラックに固定されたロボットの巻き上げ機構。
ガイノイド:アンドロイドと同様に、ガイノイドは女性の身体を呼び起こすことを意図しています。
 ビデオゲームStarcraft IIの女性化ロボットの例
ビデオゲームStarcraft IIの女性化ロボットの例
H
Haptic:ロボットマニピュレーターの触覚を利用して機械の動きを調整する技術。
ハーネス:ロボットの一部に電力とデータを供給する束ねられたワイヤ。
Hexapod:有機昆虫から着想を得た 6 本足のロボット。

ヒューマノイド:人間に似ていて、伝統的に人間だけの活動を実行することを意図したロボット。
油圧:圧力下の液体を通して力を発生させる方法。
私
産業用ロボット:製造の産業チェーンのセグメントを満たすために特殊なコマンドを実行するように設計されたマニピュレーター。 たとえば、産業用ロボットは、自動車のフレームを溶接するようにプログラムされている場合があります。
入力デバイス:人間がロボットとやり取りできるデバイス。 通常、これは将来のアクションをプログラミングするため、または即時の移動を直接制御するためのものです。
インテリジェントロボット:人間が直接介入することなく、感覚データに基づいて機能を適応できるロボット。 通常、ロボット工学と何らかの形の人工知能の融合を指すことを意味します。
J
ヤコビ行列:ロボットの配置を支援するために使用される一連のアルゴリズム。
ロボット用語 L ~ Z
L
レーザー:ロボット用の非接触センサーとしてよく使用され、距離測定から溶接まであらゆる用途に使用できる、狭く集束された光のビーム。
N
ナノボット:分子コンポーネントで構成され、ナノスケール (10 億分の 1 メートル) で動作する任意の自律デバイス
P
ペイロード:ペイロードとは、特定のロボットが運搬または持ち上げることができる重量を指します。 これは、特定のマシンの展開のサイズと複雑さに影響します。
ピンチポイント:人間の付属物や衣服に引っかかる可能性のある露出した関節。
空気圧:圧縮されたガスまたは空気を使用して力を発生させる方法。
Powered Exoskeleton:人間の骨格の強度と持久力を高めるウェアラブル マシン。
メカは SF の定番であり、外骨格が将来どのようなものになるかを示す劇的な例です。
人工装具:失われた有機体の部分を置き換えることを目的としたプログラム可能なロボット。 脚と腕の切断者の医療で最も一般的に使用されます。
R
ロボット:人間の直接の制御や活動から独立してタスクを実行できるデバイス。
RPA:比喩的なロボット ワーカーを利用して複雑なタスクを実行するソフトウェア。
S
センサー:ロボットが環境データの形式を収集するために使用できるさまざまな機器。これにより、マシンはこの刺激に基づいて自身の位置とタスクを調整できます。
特異点: 2 つの関節が共通の軸に沿って整列するロボット アームの構成。
う
Uptime:ロボットが意図したとおりに動作している時間。
知識への道
よく検索されるこれらのロボティクス用語を理解したので、ロボティクスと AI の最新の開発を探索するために必要なすべてを知っている必要があります。 作業を進めている間に、いくつかの種類のロボットを見て、今日の現場で人々が話していることをよく理解してください。
ロボティクスについてもっと学びたいですか? アイザック アシモフのロボット工学の 3 つの法則が、何十年にもわたって道徳をプログラムするためにどのように使用されてきたかを発見してください。