
일반적인 로봇 공학 용어의 이해하기 쉬운 용어집
게시 됨: 2021-09-14사람들은 로봇을 구성하는 것에 대해 매우 좁은 정의를 내리는 경향이 있습니다.
금속 팔, 서보 모터 및 시각 센서는 로봇이 만들지 않습니다. 로봇 공학의 역사를 조금만 들여다보면 오늘날의 첨단 기술 혁신만큼이나 자율적인 기계인 전기가 있기 전에 발명된 로봇의 예를 많이 발견할 수 있습니다.
로봇 용어 A~Z:
- 로봇 용어 A~E
- 로봇 용어 F~K
- 로봇 용어 L~Z
관련 로봇 용어
인터넷을 검색하는 동안 잘못된 방식으로 사용되는 여러 용어를 접했을 수 있습니다. 이 가이드는 학계와 자칭 사상가들이 던진 전문 용어를 이해하는 데 필요한 모든 것을 제공합니다.
누가 '로봇'이라는 용어를 만들었을까?
로봇이라는 단어는 작가 카렐 차펙(Karel Capek)이 1920년 희곡 로섬의 유니버설 로봇(Rossum's Universal Robots)에서 인공 오토마타를 설명하기 위해 처음 사용했습니다.
로봇 용어 A~E
ㅏ
액추에이터: 프로그래밍 신호를 읽고 이를 기계적 움직임으로 변환하는 모터.
에어로봇( Aerobot) : 독립적인 비행 능력으로 구별되는 일종의 공중 로봇.
Android: 성인 남성을 닮도록 설계된 휴머노이드 로봇. 'andro' 접두사는 기계의 할당된 남성 성별을 참조합니다.
관절식 조작기: 하나 이상의 관절에 의해 제어되는 독립적인 부분으로 분할된 로봇 팔.
Automaton: 인간 노동이 자율 기계로 대체되는 과정.
자율 차량: 일반적으로 내장된 자동 조종 장치를 통해 사람의 직접적인 제어 없이 작동할 수 있는 모든 차량.
축/자유도: 이 용어는 로봇 팔이나 몸이 어떻게 움직일 수 있는지를 나타냅니다. 이것은 특정 기계의 조인트 수에 해당합니다. 관절과 자유도가 1:1 비율은 아니지만 관절이 많을수록 로봇의 자유도를 높이는 가장 간단한 방법입니다.
비
바이오닉스: 새로운 로봇의 개발 및 설계를 위해 생물학적 시스템 또는 유기적으로 발생하는 프로세스를 사용하는 행위.
씨
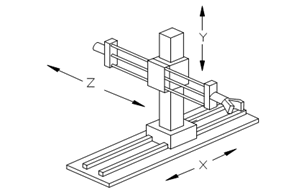 직교 로봇 예술의 기능, toshiba.com 제공
직교 로봇 예술의 기능, toshiba.com 제공
데카르트 조작기: X, Y, Z 좌표계를 따라 이동하기 위한 프리즘 조인트가 있는 로봇 팔.
중앙 처리 장치: 기능적으로 로봇의 '뇌'. 메인 회로 기판이며 사전 프로그래밍된 명령 입력을 처리합니다.
클라우드 로봇 공학: 클라우드 에서 기능적 용량을 끌어내는 모든 로봇.
코봇: 인간과 직접 인터페이스하는 로봇.
컨트롤러 시스템: 데이터를 저장하고, 프로그램을 실행하고, 로봇의 작업을 지시하는 일종의 컴퓨터입니다.
사이보그: '사이버네틱 유기체'의 줄임말로 생물학적 부분과 인공 부분을 모두 가진 모든 존재입니다.
이러한 용어가 어떻게 생겨났는지 궁금하십니까? 로봇의 역사에 대한 개요를 확인하십시오! |

디
다운타임: 로봇이 작동하지 않는 기간. 이것은 일반적으로 작동 오작동 또는 오류를 나타내는 데 사용됩니다.
이자형
엔드 이펙터: 로봇이 그리퍼 또는 용접 건과 같은 특정 작업을 실행할 수 있도록 특별히 설계된 도구의 총칭.
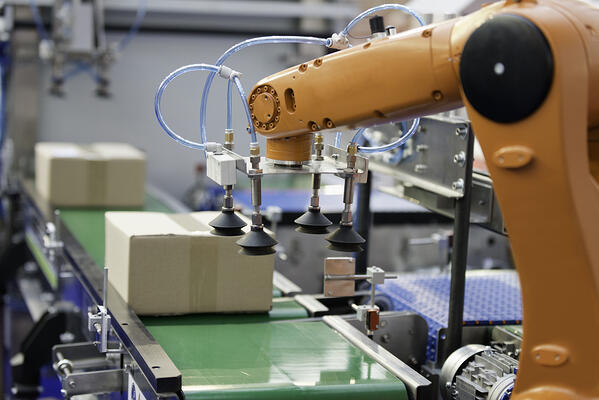 산업용 로봇의 엔드 이펙터 예(출처: robots.org)
산업용 로봇의 엔드 이펙터 예(출처: robots.org)
로봇 공학 용어 F부터 K
에프
피드백 센서: 환경 데이터가 로봇의 동작을 조정하는 데 사용하는 중앙 처리 장치로 피드백되는 메커니즘입니다.
 로봇 센서의 다양한 변형(출처: http://iggyclass.blogspot.com)
로봇 센서의 다양한 변형(출처: http://iggyclass.blogspot.com)

힘 제한: 인간이 장벽이나 보호막 없이 주변에서 작업할 수 있도록 로봇이 느리고 안전한 속도로 움직이도록 프로그래밍하는 안전 기능입니다.
힘 센서: 로봇의 기본 조작자가 가하는 힘을 모니터링하는 장치로, 일반적으로 사람을 위한 안전 조치로 장치에 가해지는 변형을 모니터링합니다.
G
갠트리(Gantry): 플랫폼이나 트랙에 고정된 로봇의 호이스팅 메커니즘.
Gynoid: 안드로이드와 유사하게 Gynoid는 여성의 몸을 불러일으키기 위한 것입니다.
 비디오 게임 Starcraft II의 여성화된 로봇의 예
비디오 게임 Starcraft II의 여성화된 로봇의 예
시간
햅틱: 로봇 조작기의 촉각을 사용하여 기계의 움직임을 조정하는 기술.
하네스: 로봇의 일부에 전력과 데이터를 전달하는 번들 와이어입니다.
헥사포드: 유기 곤충에서 영감을 얻은 6족 로봇.

휴머노이드: 인간을 닮고 전통적으로 인간 배타적 활동을 수행하도록 의도된 모든 로봇.
수력학: 압력을 받는 액체를 통해 힘을 생성하는 방법.
나
산업용 로봇: 산업용 제조 체인의 한 부분을 채우기 위해 특수 명령을 실행하도록 설계된 조작기. 예를 들어 산업용 로봇은 자동차 프레임을 함께 용접하도록 프로그래밍될 수 있습니다.
입력 장치: 인간이 로봇과 인터페이스할 수 있도록 하는 모든 장치. 일반적으로 이것은 미래의 동작을 프로그래밍하거나 즉각적인 운동을 직접 제어하기 위한 것입니다.
지능형 로봇: 인간의 직접적인 개입 없이 감각 데이터를 기반으로 기능을 조정할 수 있는 로봇. 일반적으로 로봇 공학과 인공 지능의 일부 형태의 융합을 의미합니다.
제이
야코비안 행렬: 로봇의 위치를 지정하는 데 사용되는 알고리즘 집합입니다.
로봇 용어 L~Z
엘
레이저: 로봇의 비접촉 센서로 자주 사용되며 거리 찾기에서 용접에 이르기까지 모든 작업에 사용할 수 있는 좁고 집중된 빛의 빔입니다.
N
Nanobot: 분자 구성 요소로 구성되고 나노 규모(10억분의 1미터)에서 작동하는 모든 자율 장치
피
탑재하중: 탑재하중은 특정 로봇이 운반하거나 들어 올릴 수 있는 무게를 나타냅니다. 이것은 주어진 머신에 대한 배포의 크기와 복잡성에 영향을 미칩니다.
핀치 포인트: 사람의 부속물이나 의복을 잡을 수 있는 노출된 관절.
공압: 압축 가스 또는 공기를 사용하여 힘을 발생시키는 방법.
Powered Exoskeleton: 인체 골격의 강도와 지구력을 증가시키는 웨어러블 기계.
기계는 공상과학 소설의 필수품이자 언젠가 외골격이 어떻게 될 수 있는지에 대한 극적인 예입니다.
보철: 누락된 유기적 신체 부위를 대체하기 위한 프로그래밍 가능한 로봇. 다리와 팔 절단 환자의 의학에서 가장 일반적으로 사용됩니다.
아르 자형
로봇: 인간의 직접적인 통제나 활동과 무관하게 작업을 실행할 수 있는 장치.
RPA: 은유적 로봇 작업자를 활용하여 복잡한 작업을 실행하는 소프트웨어입니다.
에스
센서: 로봇이 환경 데이터 형태를 수집하는 데 사용할 수 있는 다양한 도구로 기계가 이 자극을 기반으로 자신의 위치와 작업을 조정할 수 있습니다.
특이점: 두 개의 관절이 공통 축을 따라 정렬되는 로봇 팔의 구성.
유
가동 시간: 로봇이 의도한 대로 작동하는 시간입니다.
지식의 길
이제 일반적으로 검색되는 로봇 용어를 이해했으므로 로봇 및 AI의 최신 개발을 탐색하는 데 필요한 모든 것을 알아야 합니다! 이 작업을 하는 동안 오늘날 현장에서 사람들이 말하는 내용을 잘 이해하기 위해 일부 로봇 유형을 살펴보십시오.
로봇에 대해 더 알고 싶으십니까? 아이작 아시모프(Isaac Asimov)의 로봇 공학 세 가지 법칙이 수십 년 동안 도덕성을 프로그램하는 데 어떻게 사용되었는지 알아보세요.