
อภิธานศัพท์ที่เข้าใจง่ายของข้อกำหนดทั่วไปเกี่ยวกับวิทยาการหุ่นยนต์
เผยแพร่แล้ว: 2021-09-14ผู้คนมักมีคำจำกัดความที่แคบมากเกี่ยวกับสิ่งที่ประกอบเป็นหุ่นยนต์
แขนโลหะ เซอร์โวมอเตอร์ และเซ็นเซอร์ภาพไม่ได้ผลิตโดยหุ่นยนต์ หากคุณทำการตรวจสอบประวัติของวิทยาการหุ่นยนต์แบบคร่าวๆ คุณจะพบตัวอย่างมากมายของหุ่นยนต์ที่ประดิษฐ์ขึ้นก่อนที่จะมีกระแสไฟฟ้าซึ่งเป็นเครื่องจักรที่ควบคุมตนเองได้มากพอๆ กับนวัตกรรมไฮเทคในปัจจุบัน
เงื่อนไขหุ่นยนต์ A ถึง Z:
- เงื่อนไขหุ่นยนต์ A ถึง E
- เงื่อนไขหุ่นยนต์ F ถึง K
- เงื่อนไขหุ่นยนต์ L ถึง Z
คำศัพท์เกี่ยวกับวิทยาการหุ่นยนต์ที่เกี่ยวข้อง
ขณะติดตามอินเทอร์เน็ต คุณอาจพบคำศัพท์หลายคำที่ใช้ในลักษณะที่ไม่ถูกต้องทั้งหมด คู่มือนี้จะให้ทุกสิ่งที่คุณต้องการเพื่อทำความเข้าใจเกี่ยวกับศัพท์แสงที่นักวิชาการและผู้นำทางความคิดที่มีสไตล์ในตัวเองโยนทิ้งไป
ใครเป็นคนบัญญัติคำว่า 'หุ่นยนต์'?
คำว่า 'หุ่นยนต์' ถูกใช้ครั้งแรกเพื่ออธิบายออโตมาตาประดิษฐ์โดยนักเขียน Karel Capek ในการเล่น Universal Robots ของ Rossum ในปี 1920
เงื่อนไขหุ่นยนต์ A ถึง E
อา
แอค ชูเอเตอร์: มอเตอร์ที่อ่านสัญญาณการเขียนโปรแกรมและแปลเป็นการเคลื่อนไหวทางกล
Aerobot : หุ่นยนต์ทางอากาศประเภทหนึ่งที่แยกจากกันด้วยความสามารถในการบินอิสระ
Android: หุ่นยนต์ฮิวแมนนอยด์ที่ออกแบบมาให้ดูเหมือนมนุษย์ผู้ใหญ่ คำนำหน้า 'andro' อ้างอิงถึงเพศชายที่กำหนดของเครื่อง
Articulated manipulator: แขนหุ่นยนต์ที่แบ่งออกเป็นส่วนอิสระที่ควบคุมโดยข้อต่ออย่างน้อยหนึ่งข้อ
หุ่นยนต์: กระบวนการที่แรงงานมนุษย์ถูกแทนที่ด้วยเครื่องจักรอัตโนมัติ
รถยนต์ขับเคลื่อนอัตโนมัติ : ยาน พาหนะใดๆ ก็ตามที่สามารถทำงานได้โดยไม่ต้องมีการควบคุมจากมนุษย์โดยตรง โดยปกติแล้วจะผ่านระบบออโตไพลอตในตัว
แกน/ระดับความเป็นอิสระ: คำนี้หมายถึงแขนหรือร่างกายของหุ่นยนต์สามารถเคลื่อนที่ได้อย่างไร ซึ่งสอดคล้องกับจำนวนข้อต่อในเครื่องใดเครื่องหนึ่ง แม้ว่าข้อต่อต่อองศาอิสระจะไม่ใช่อัตราส่วน 1:1 แต่ข้อต่อจำนวนมากขึ้นเป็นวิธีที่ตรงไปตรงมาที่สุดในการบรรลุระดับอิสระที่มากขึ้นสำหรับหุ่นยนต์
บี
Bionics: การกระทำของการใช้ระบบชีวภาพหรือกระบวนการที่เกิดขึ้นตามธรรมชาติในการพัฒนาและออกแบบหุ่นยนต์ตัวใหม่
ค
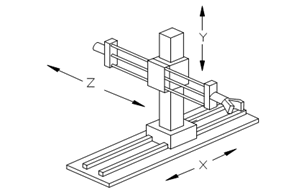 หน้าที่ของศิลปะหุ่นยนต์คาร์ทีเซียน ได้รับความอนุเคราะห์จาก toshiba.com
หน้าที่ของศิลปะหุ่นยนต์คาร์ทีเซียน ได้รับความอนุเคราะห์จาก toshiba.com
หุ่นยนต์ ควบคุมคาร์ทีเซียน: แขนหุ่นยนต์ที่มีข้อต่อปริซึมสำหรับการเคลื่อนที่ตามระบบพิกัด X, Y, Z
หน่วยประมวลผลกลาง: ตามหน้าที่ 'สมอง' ของหุ่นยนต์ เป็นแผงวงจรหลักและประมวลผลอินพุตที่ตั้งโปรแกรมไว้ล่วงหน้าและคำสั่ง
หุ่นยนต์ระบบคลาวด์: หุ่น ยนต์ใดๆ ก็ตามที่ได้รับความสามารถในการใช้งานจากคลาวด์
Cobots: หุ่นยนต์ที่ติดต่อกับมนุษย์โดยตรง
ระบบควบคุม: คอมพิวเตอร์บางประเภทที่เก็บข้อมูล รันโปรแกรม และควบคุมการทำงานของหุ่นยนต์
ไซบอร์ก: ชวเลขสำหรับ 'สิ่งมีชีวิตในโลกไซเบอร์' เป็นสิ่งมีชีวิตใด ๆ ที่มีทั้งส่วนทางชีวภาพและเทียม
สนใจว่าเงื่อนไขเหล่านี้เกิดขึ้นได้อย่างไร? ตรวจสอบภาพรวมประวัติหุ่นยนต์ของเรา! |

ดี
เวลาหยุดทำงาน: ช่วงเวลาใดๆ ที่หุ่นยนต์ไม่ทำงาน นี้มักจะใช้เพื่ออ้างถึงการทำงานผิดปกติหรือข้อผิดพลาด
อี
End effector: คำทั่วไปสำหรับเครื่องมือที่ออกแบบมาโดยเฉพาะเพื่อให้หุ่นยนต์ทำงานเฉพาะ เช่น กริปเปอร์หรือปืนเชื่อม
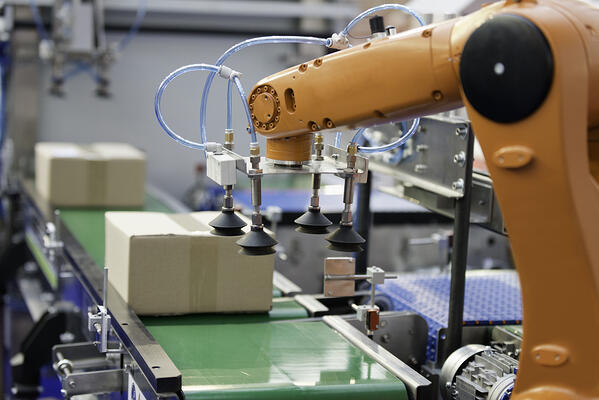 ตัวอย่างของ end-effector บนหุ่นยนต์อุตสาหกรรม (ที่มา: robotics.org)
ตัวอย่างของ end-effector บนหุ่นยนต์อุตสาหกรรม (ที่มา: robotics.org)
เงื่อนไขวิทยาการหุ่นยนต์ F ถึง K
F
เซ็นเซอร์ป้อนกลับ: กลไกในการส่งข้อมูลสิ่งแวดล้อมกลับไปยังหน่วยประมวลผลกลาง ซึ่งใช้เพื่อปรับการเคลื่อนไหวของหุ่นยนต์
 เซนเซอร์หุ่นยนต์รุ่นต่างๆ (ที่มา: http://iggyclass.blogspot.com)
เซนเซอร์หุ่นยนต์รุ่นต่างๆ (ที่มา: http://iggyclass.blogspot.com)

การจำกัดแรง: คุณลักษณะด้านความปลอดภัยที่ตั้งโปรแกรมให้หุ่นยนต์เคลื่อนที่ด้วยความเร็วที่ช้าและปลอดภัย เพื่อให้มนุษย์สามารถหลีกเลี่ยงได้โดยไม่มีสิ่งกีดขวางหรือเกราะป้องกัน
Force Sensor: อุปกรณ์ที่ตรวจสอบแรงที่กระทำโดยเครื่องมือควบคุมหลักของหุ่นยนต์ ซึ่งมักจะเป็นมาตรการด้านความปลอดภัยสำหรับมนุษย์และเพื่อติดตามความเครียดบนอุปกรณ์
จี
Gantry: กลไกการยกสำหรับหุ่นยนต์ที่ยึดติดกับแท่นหรือราง
ไจนอยด์: คล้ายกับหุ่นยนต์ ไจนอยด์มีไว้เพื่อเรียกร่างกายผู้หญิง
 ตัวอย่างหุ่นยนต์สตรีจากวิดีโอเกม Starcraft II
ตัวอย่างหุ่นยนต์สตรีจากวิดีโอเกม Starcraft II
ชม
Haptic: เทคโนโลยีที่ใช้ความรู้สึกสัมผัสในหุ่นยนต์จัดการเพื่อปรับการเคลื่อนไหวของเครื่อง
สายรัด: สายไฟมัดรวมซึ่งส่งกำลังและข้อมูลไปยังส่วนหนึ่งของหุ่นยนต์
Hexapod: หุ่นยนต์หกขาที่ได้รับแรงบันดาลใจจากแมลงอินทรีย์

ฮิวแมนนอย ด์: หุ่นยนต์ใดๆ ก็ตามที่ตั้งใจจะมีลักษณะคล้ายมนุษย์และดำเนินกิจกรรมเฉพาะมนุษย์ตามธรรมเนียม
ไฮดรอลิกส์: วิธีการสร้างแรงผ่านของเหลวภายใต้แรงดัน
ฉัน
หุ่นยนต์อุตสาหกรรม: หุ่นยนต์ ที่ออกแบบมาเพื่อดำเนินการคำสั่งเฉพาะเพื่อเติมเต็มส่วนของห่วงโซ่อุตสาหกรรมของการประดิษฐ์ ตัวอย่างเช่น หุ่นยนต์อุตสาหกรรมอาจถูกตั้งโปรแกรมให้เชื่อมโครงรถเข้าด้วยกัน
อุปกรณ์อินพุต: อุปกรณ์ ใดๆ ที่มนุษย์สามารถเชื่อมต่อกับหุ่นยนต์ได้ โดยปกติจะมีไว้เพื่อวัตถุประสงค์ในการเขียนโปรแกรมการกระทำในอนาคตหรือควบคุมการเคลื่อนที่ในทันทีโดยตรง
หุ่นยนต์อัจฉริยะ: หุ่นยนต์ที่สามารถปรับการทำงานตามข้อมูลทางประสาทสัมผัสโดยปราศจากการแทรกแซงของมนุษย์โดยตรง มักหมายถึงการหลอมรวมของหุ่นยนต์และปัญญาประดิษฐ์บางรูปแบบ
เจ
เมทริกซ์จาโคเบียน: ชุดของอัลกอริทึมที่ใช้เพื่อช่วยวางตำแหน่งหุ่นยนต์
เงื่อนไขหุ่นยนต์ L ถึง Z
หลี่
เลเซอร์: ลำแสงแคบและโฟกัสที่มักใช้เป็นเซ็นเซอร์แบบไม่สัมผัสสำหรับหุ่นยนต์และใช้ได้กับทุกอย่างตั้งแต่การค้นหาระยะทางไปจนถึงการเชื่อม
นู๋
Nanobot: อุปกรณ์อิสระใดๆ ที่สร้างขึ้นจากส่วนประกอบระดับโมเลกุลและทำงานในระดับนาโน (หนึ่งในพันล้านของเมตร)
พี
น้ำหนักบรรทุก: น้ำหนักบรรทุกหมายถึงน้ำหนักที่หุ่นยนต์ตัวใดตัวหนึ่งสามารถบรรทุกหรือยกได้ ซึ่งจะส่งผลต่อขนาดและความซับซ้อนของการปรับใช้สำหรับเครื่องที่กำหนด
Pinch Points: ข้อต่อที่สัมผัสได้ซึ่งสามารถจับอวัยวะหรือเสื้อผ้าของมนุษย์ได้
นิวเมติกส์: วิธีการสร้างแรงโดยใช้ก๊าซหรืออากาศอัด
Powered Exoskeleton: เครื่องจักรที่สวมใส่ได้ซึ่งเพิ่มความแข็งแกร่งและความทนทานของโครงร่างมนุษย์
เครื่องจักรเป็นแกนหลักของไซไฟและตัวอย่างที่น่าทึ่งของสิ่งที่โครงกระดูกภายนอกสามารถทำได้ในวันหนึ่ง
เทียม: หุ่นยนต์ที่ตั้งโปรแกรมได้มีไว้เพื่อทดแทนส่วนของร่างกายออร์แกนิกที่ขาดหายไป นิยมใช้ในการแพทย์สำหรับผู้พิการขาและแขน
R
หุ่นยนต์: อุปกรณ์ที่สามารถทำงานโดยไม่ขึ้นกับการควบคุมหรือกิจกรรมของมนุษย์โดยตรง
RPA: ซอฟต์แวร์ที่ใช้คนงานหุ่นยนต์เชิงเปรียบเทียบเพื่อดำเนินงานที่ซับซ้อน
ส
เซนเซอร์: เครื่องมือต่างๆ ที่หุ่นยนต์สามารถใช้เพื่อรวบรวมข้อมูลด้านสิ่งแวดล้อมในรูปแบบต่างๆ ซึ่งช่วยให้เครื่องสามารถปรับตำแหน่งและงานของตัวเองตามสิ่งเร้านี้
ภาวะ เอกฐาน: การกำหนดค่าของแขนหุ่นยนต์โดยที่ข้อต่อทั้งสองจะจัดแนวตามแนวแกนร่วม
ยู
เวลาทำงาน : ช่วงเวลาที่หุ่นยนต์ทำงานตามที่ตั้งใจไว้
เส้นทางสู่ความรู้
เมื่อคุณเข้าใจคำศัพท์เกี่ยวกับวิทยาการหุ่นยนต์ที่มักใช้ค้นหาแล้ว คุณควรทราบทุกสิ่งที่คุณจำเป็นต้องทราบเพื่อสำรวจการพัฒนาล่าสุดในด้านวิทยาการหุ่นยนต์และ AI! ขณะที่คุณกำลังดูอยู่ ให้ดูหุ่นยนต์บางประเภทเพื่อทำความเข้าใจว่าผู้คนกำลังพูดถึงอะไรในภาคสนามในปัจจุบัน
สนใจเรียนรู้เพิ่มเติมเกี่ยวกับวิทยาการหุ่นยนต์หรือไม่? ค้นพบว่ากฎหุ่นยนต์สามข้อของไอแซค อาซิมอฟถูกใช้มานานหลายทศวรรษเพื่อกำหนดโปรแกรมศีลธรรมอย่างไร