
Um glossário fácil de entender de termos comuns de robótica
Publicados: 2021-09-14As pessoas tendem a ter uma definição muito restrita do que constitui um robô.
Braços de metal, servomotores e sensores visuais não fazem um robô. Se você fizer um exame superficial da história da robótica, encontrará muitos exemplos de robôs inventados antes da eletricidade que são máquinas autônomas tanto quanto as inovações de alta tecnologia de hoje.
Termos do robô de A a Z:
- Termos do robô de A a E
- Termos do robô F a K
- Termos do robô de L a Z
Terminologia robótica relevante
Ao pesquisar na internet, você pode ter encontrado vários termos sendo usados de todas as maneiras incorretas. Este guia fornecerá tudo o que você precisa para compreender o jargão usado por acadêmicos e líderes de pensamento autodenominados.
Quem cunhou o termo 'robô'?
A palavra 'Robot' foi usada pela primeira vez para descrever autômatos artificiais pelo escritor Karel Capek em sua peça de 1920, Rossum's Universal Robots.
Termos do robô de A a E
UMA
Atuador: um motor que lê os sinais de programação e os traduz em movimento mecânico.
Aerobot : um tipo de robô aéreo que se destaca por sua capacidade de voo independente.
Android: um robô humanóide projetado para se assemelhar a um homem humano adulto. O prefixo 'andro' refere-se ao gênero masculino atribuído à máquina.
Manipulador articulado: um braço robótico que é dividido em segmentos independentes que são controlados por uma ou mais articulações.
Autômato: o processo pelo qual o trabalho humano é substituído por máquinas autônomas.
Veículo autônomo: qualquer veículo que possa operar sem controle humano direto, geralmente por meio de um sistema de piloto automático integrado.
Eixo/grau de liberdade: este termo refere-se a como um braço ou corpo do robô pode manobrar. Isso corresponde ao número de juntas em uma determinada máquina. Embora as juntas para graus de liberdade não sejam uma proporção de 1:1, mais juntas é a maneira mais direta de obter um maior grau de liberdade para um robô.
B
Biônica: o ato de usar sistemas biológicos ou processos de ocorrência orgânica para o desenvolvimento e projeto de novos robôs.
C
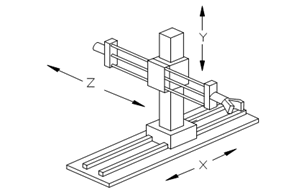 função de uma arte robótica cartesiana, cortesia de toshiba.com
função de uma arte robótica cartesiana, cortesia de toshiba.com
Manipulador cartesiano: um braço robótico com juntas prismáticas para movimento ao longo do sistema de coordenadas X, Y, Z.
Unidade central de processamento: funcionalmente, o 'cérebro' do robô. É a placa de circuito principal e processa as entradas pré-programadas e de comando.
Robótica em nuvem: qualquer robô que deriva uma capacidade funcional da nuvem.
Cobots: robôs que interagem diretamente com humanos.
Sistema Controlador: um computador de algum tipo que armazena dados, executa programas e direciona as operações do robô.
Ciborgue: abreviação de 'organismo cibernético', é qualquer ser que possui partes biológicas e artificiais.
Interessado em como esses termos surgiram? Confira nossa visão geral da História dos Robôs! |

D
Tempo de inatividade: qualquer período de tempo em que um robô não está funcionando. Isso geralmente é usado para se referir ao mau funcionamento ou erro operacional.
E
Efetor final: um termo geral para a ferramenta projetada especificamente para permitir que um robô execute uma tarefa específica, como uma pinça ou uma pistola de soldagem.
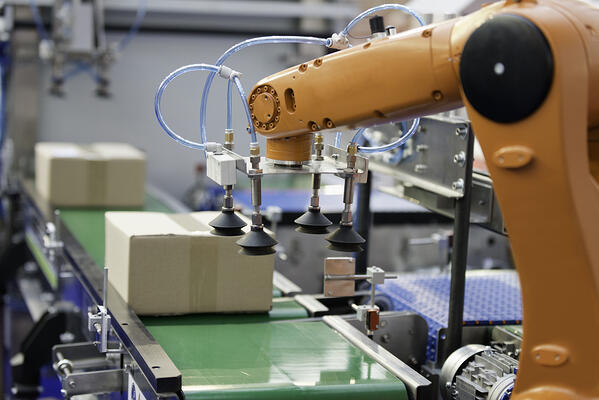 Um exemplo de um efetuador em um robô industrial (fonte: robotics.org)
Um exemplo de um efetuador em um robô industrial (fonte: robotics.org)
Termos de robótica F a K
F
Sensor de feedback: o mecanismo através do qual os dados ambientais são realimentados para a unidade central de processamento, que os utiliza para ajustar os movimentos do robô.
 Diferentes variantes de sensores de robôs (fonte: http://iggyclass.blogspot.com)
Diferentes variantes de sensores de robôs (fonte: http://iggyclass.blogspot.com)

Limitação de força: um recurso de segurança que programa um robô para se mover em uma velocidade lenta e segura para permitir que os humanos trabalhem em torno dele sem barreiras ou escudos.
Sensor de Força: um dispositivo que monitora a força exercida pelo manipulador primário de um robô, geralmente como medida de segurança para humanos e para monitorar a tensão no dispositivo.
G
Pórtico: um mecanismo de içamento para um robô que é fixado a uma plataforma ou trilho.
Ginóide: semelhante a um andróide, um ginóide destina-se a invocar o corpo feminino.
 Exemplo de um robô feminizado do videogame Starcraft II
Exemplo de um robô feminizado do videogame Starcraft II
H
Háptica: tecnologia que utiliza o sentido do tato em um robô manipulador para ajustar os movimentos da máquina.
Chicote: fios agrupados que fornecem energia e dados a uma parte do robô.
Hexapod: um robô de seis patas que se inspira em insetos orgânicos.

Humanóide: qualquer robô destinado a se parecer com um humano e executar atividades tradicionalmente exclusivas de humanos.
Hidráulica: um método para gerar força através de líquido sob pressão.
EU
Robô industrial: um manipulador projetado para executar comandos especializados a fim de preencher um segmento da cadeia industrial de fabricação. Por exemplo, um robô industrial pode ser programado para soldar estruturas de carros.
Dispositivo de entrada: qualquer dispositivo que permita a interface humana com um robô. Normalmente, isso é para fins de programação de ações futuras ou controle direto sobre a locomoção imediata.
Robô inteligente: um robô que pode adaptar sua função com base em dados sensoriais sem intervenção humana direta. Geralmente destinado a se referir à fusão de robótica e alguma forma de inteligência artificial.
J
Matriz Jacobiana: um conjunto de algoritmos que são usados para ajudar a posicionar um robô.
Termos do robô de L a Z
eu
Laser: um feixe de luz estreito e focado que é frequentemente usado como sensores sem contato para robôs e pode ser usado para qualquer coisa, desde encontrar distância até soldagem.
N
Nanobot: qualquer dispositivo autônomo construído de componentes moleculares e operando em nanoescala (um bilionésimo de metro)
P
Carga útil: a carga útil refere-se ao peso que um determinado robô pode carregar ou levantar. Isso afetará o tamanho e a complexidade da implantação de uma determinada máquina.
Pontos de esmagamento: quaisquer articulações expostas que possam prender apêndices ou roupas humanas.
Pneumática: um método para gerar força usando gás ou ar comprimido.
Exoesqueleto motorizado: uma máquina vestível que aumenta a força e a resistência da estrutura humana.
O mech é um grampo de ficção científica e um exemplo dramático do que os exoesqueletos poderiam um dia ser
Prótese: robôs programáveis destinados a substituir partes orgânicas do corpo ausentes. Mais comumente usado na medicina para amputados de pernas e braços.
R
Robô: um dispositivo que pode executar uma tarefa independente do controle ou atividade humana direta.
RPA: software que utiliza robôs metafóricos para executar tarefas complexas.
S
Sensor: vários instrumentos que os robôs podem usar para coletar formas de dados ambientais que permitem que a máquina ajuste sua própria posição e tarefas com base nesses estímulos.
Singularidade: uma configuração de um braço de robô onde duas juntas se alinham ao longo de um eixo comum.
você
Uptime: o período de tempo em que um robô está operando como pretendido.
O caminho para o conhecimento
Agora que você entende esses termos de robótica comumente pesquisados, você deve saber tudo o que precisa para explorar os mais recentes desenvolvimentos em robótica e IA! Enquanto você está nisso, dê uma olhada em alguns dos tipos de robôs para ter uma boa noção do que as pessoas estão falando no campo hoje.
Quer saber mais sobre robótica? Descubra como as três leis da robótica de Isaac Asimov foram usadas por décadas para programar a moralidade.