
Un glossario di facile comprensione dei termini comuni della robotica
Pubblicato: 2021-09-14Le persone tendono ad avere una definizione molto ristretta di ciò che costituisce un robot.
Bracci metallici, servomotori e sensori visivi non sono prodotti da un robot. Se prendi anche un esame superficiale della storia della robotica, troverai molti esempi di robot inventati prima che esistesse l'elettricità che sono macchine altrettanto autonome quanto le innovazioni high-tech di oggi.
Termini del robot dalla A alla Z:
- Termini del robot da A a E
- Termini del robot da F a K
- Termini del robot da L a Z
Terminologia relativa alla robotica
Durante la ricerca su Internet, potresti esserti imbattuto in diversi termini usati in tutti i modi in modo errato. Questa guida ti fornirà tutto ciò di cui hai bisogno per comprendere il gergo utilizzato da accademici e sedicenti leader del pensiero.
Chi ha coniato il termine "robot"?
La parola "Robot" fu usata per la prima volta per descrivere gli automi artificiali dallo scrittore Karel Capek nella sua opera teatrale del 1920 Rossum's Universal Robots.
Termini del robot da A a E
UN
Attuatore: un motore che legge i segnali di programmazione e li traduce in movimento meccanico.
Aerobot : un tipo di robot aereo che si distingue per la sua capacità di volo indipendente.
Android: un robot umanoide progettato per assomigliare a un maschio umano adulto. Il prefisso 'andro' è in riferimento al genere maschile assegnato alla macchina.
Manipolatore articolato: un braccio robotico suddiviso in segmenti indipendenti controllati da uno o più giunti.
Automa: il processo mediante il quale il lavoro umano viene sostituito da macchine autonome.
Veicolo autonomo: qualsiasi veicolo in grado di operare senza il controllo umano diretto, solitamente attraverso un sistema di pilota automatico integrato.
Asse/grado di libertà: questo termine si riferisce a come il braccio o il corpo di un robot può manovrare. Ciò corrisponde al numero di giunti in una macchina particolare. Anche se giunti a gradi di libertà non è un rapporto 1:1, più giunti è il modo più semplice per ottenere un maggiore grado di libertà per un robot.
B
Bionica: l'atto di utilizzare sistemi biologici o processi organici per lo sviluppo e la progettazione di nuovi robot.
C
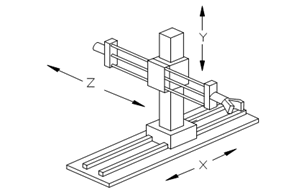 funzione di un'arte robotica cartesiana, per gentile concessione di toshiba.com
funzione di un'arte robotica cartesiana, per gentile concessione di toshiba.com
Manipolatore cartesiano: un braccio robotico con giunti prismatici per il movimento lungo il sistema di coordinate X, Y, Z.
Unità centrale di elaborazione: funzionalmente, il 'cervello' del robot. È il circuito stampato principale e processa gli ingressi preprogrammati e di comando.
Robotica del cloud: qualsiasi robot che tragga una capacità funzionale dal cloud.
Cobot: robot che si interfacciano direttamente con l'uomo.
Sistema di controllo: un computer di qualche tipo che memorizza dati, esegue programmi e dirige le operazioni del robot.
Cyborg: abbreviazione di "organismo cibernetico", è qualsiasi essere che possiede parti sia biologiche che artificiali.
Interessato a come sono nati questi termini? Dai un'occhiata alla nostra panoramica della storia dei robot! |

D
Tempo di fermo: qualsiasi periodo di tempo in cui un robot non è in funzione. Questo è solitamente usato per riferirsi a malfunzionamenti o errori operativi.
e
End effector: termine generico per l'utensile specificamente progettato per consentire a un robot di eseguire un compito specifico, come una pinza o una pistola di saldatura.
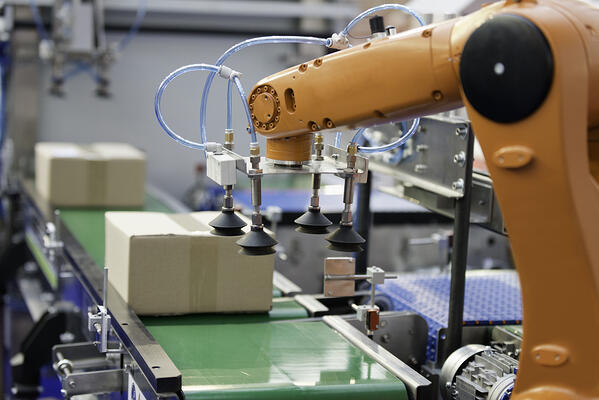 Un esempio di end-effector su un robot industriale (fonte: robotics.org)
Un esempio di end-effector su un robot industriale (fonte: robotics.org)
Termini di robotica da F a K
F
Sensore di feedback: il meccanismo attraverso il quale i dati ambientali vengono restituiti all'unità di elaborazione centrale, che li utilizza per regolare i movimenti del robot.
 Diverse varianti di sensori robot (fonte: http://iggyclass.blogspot.com)
Diverse varianti di sensori robot (fonte: http://iggyclass.blogspot.com)

Limitazione della forza: una funzione di sicurezza che programma un robot in modo che si muova a una velocità lenta e sicura per consentire agli esseri umani di aggirarlo senza barriere o scudi.
Sensore di forza: un dispositivo che monitora la forza esercitata dal manipolatore principale di un robot, solitamente come misura di sicurezza per l'uomo e per monitorare lo sforzo sul dispositivo.
G
Gantry: un meccanismo di sollevamento per un robot fissato a una piattaforma oa un binario.
Ginoide: simile a un androide, un ginoide ha lo scopo di invocare il corpo femminile.
 Esempio di robot femminizzato dal videogioco Starcraft II
Esempio di robot femminizzato dal videogioco Starcraft II
H
Haptic: tecnologia che utilizza il senso del tatto in un robot manipolatore per regolare i movimenti della macchina.
Cablaggio: cavi in bundle che forniscono alimentazione e dati a una parte del robot.
Hexapod: un robot a sei zampe che prende ispirazione dagli insetti organici.

Umanoide: qualsiasi robot destinato a somigliare a un essere umano ed eseguire attività tradizionalmente esclusive per l'uomo.
Idraulica: un metodo per generare forza attraverso un liquido sotto pressione.
io
Robot industriale: un manipolatore progettato per eseguire comandi specializzati al fine di riempire un segmento della catena di fabbricazione industriale. Ad esempio, un robot industriale potrebbe essere programmato per saldare insieme i telai delle automobili.
Dispositivo di input: qualsiasi dispositivo che consenta agli esseri umani di interfacciarsi con un robot. Di solito, questo è allo scopo di programmare azioni future o controllare direttamente la locomozione immediata.
Robot intelligente: un robot in grado di adattare la sua funzione sulla base di dati sensoriali senza l'intervento umano diretto. Solitamente inteso per riferirsi alla fusione di robotica e qualche forma di intelligenza artificiale.
J
Matrice Jacobiana: un insieme di algoritmi utilizzati per aiutare a posizionare un robot.
Termini del robot da L a Z
l
Laser: un raggio di luce stretto e focalizzato che viene spesso utilizzato come sensore senza contatto per i robot e può essere utilizzato per qualsiasi cosa, dal rilevamento della distanza alla saldatura.
N
Nanobot: qualsiasi dispositivo autonomo costituito da componenti molecolari e funzionante su scala nanometrica (un miliardesimo di metro)
P
Carico utile: il carico utile si riferisce al peso che un particolare robot può trasportare o sollevare. Ciò influenzerà le dimensioni e la complessità della distribuzione per una determinata macchina.
Punti di presa: qualsiasi articolazione esposta che potrebbe intrappolare appendici o indumenti umani.
Pneumatica: un metodo per generare forza utilizzando gas compresso o aria.
Powered Exoskeleton: una macchina indossabile che aumenta la forza e la resistenza della struttura umana.
Il mech è un fiocco di fantascienza e un esempio drammatico di ciò che un giorno potrebbero essere gli esoscheletri
Protesi: robot programmabili destinati a sostituire parti organiche del corpo mancanti. Più comunemente usato in medicina per gli amputati di gambe e braccia.
R
Robot: un dispositivo in grado di eseguire un'attività indipendentemente dal controllo o dall'attività umana diretta.
RPA: software che utilizza robot metaforici per eseguire compiti complessi.
S
Sensore: vari strumenti che i robot possono utilizzare per raccogliere forme di dati ambientali che consentono alla macchina di regolare la propria posizione e le proprie attività in base a questi stimoli.
Singolarità: una configurazione di un braccio robotico in cui due giunti si allineano lungo un asse comune.
u
Tempo di attività: il periodo di tempo in cui un robot funziona come previsto.
La via della conoscenza
Ora che hai compreso questi termini di robotica comunemente ricercati, dovresti sapere tutto ciò di cui hai bisogno per esplorare gli ultimi sviluppi della robotica e dell'IA! Già che ci sei, dai un'occhiata ad alcuni tipi di robot per farti un'idea di ciò di cui parlano le persone sul campo oggi.
Vuoi saperne di più sulla robotica? Scopri come le tre leggi della robotica di Isaac Asimov sono state utilizzate per decenni per programmare la moralità.